Püsimagnetiga sünkroonmootori tagumine EMF
1. Kuidas tekib tagasi-EMF?
Vastupidise elektromotoorjõu teket on lihtne mõista. Põhimõte on selles, et juht lõikab magnetilisi jõujooni. Niikaua kui nende kahe vahel on suhteline liikumine, võib magnetväli olla paigal ja juht lõikab seda või juht võib olla paigal ja magnetväli liigub.
Püsimagnetiga sünkroonmootorite puhul on mähised kinnitatud staatori (juhi) külge ja püsimagnetid rootori (magnetvälja) külge. Kui rootor pöörleb, pöörleb rootoril olevate püsimagnetite tekitatud magnetväli ja staatoril olevad mähised lõikavad seda, tekitades mähistes tagasivooluelektromotoorjõu. Miks seda nimetatakse tagasivooluelektromotoorjõuks? Nagu nimigi ütleb, on tagasivooluelektromotoorjõu E suund vastupidine klemmipinge U suunale (nagu on näidatud joonisel 1).
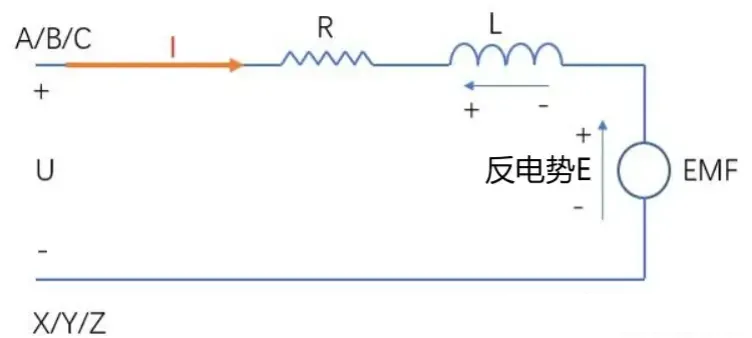
Joonis 1
2. Milline on seos vastu-EMJ ja klemmipinge vahel?
Jooniselt 1 on näha, et tagumise elektromotoorjõu ja klemmipinge vaheline seos koormuse all on:
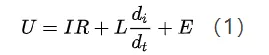
Vastuvooluelektromotoorjõu katse viiakse üldiselt läbi koormuseta olekus, vooluta ja kiirusel 1000 p/min. Üldiselt defineeritakse 1000 p/min väärtust kui vastuvooluelektromotoorjõu koefitsient = keskmine vastuvooluelektromotoorjõu väärtus/kiirus. Vastuvooluelektromotoorjõu koefitsient on mootori oluline parameeter. Siinkohal tuleb märkida, et koormuse all olev vastuvooluelektromotoorjõud muutub pidevalt enne kiiruse stabiliseerumist. Valemist (1) näeme, et koormuse all olev vastuvooluelektromotoorjõud on väiksem kui klemmipinge. Kui vastuvooluelektromotoorjõud on suurem kui klemmipinge, muutub see generaatoriks ja väljastab pinget väljapoole. Kuna tegeliku töö takistus ja vool on väikesed, on vastuvooluelektromotoorjõu väärtus ligikaudu võrdne klemmipingega ja seda piirab klemmipinge nimiväärtus.
3. Vastupidise elektromotoorjõu füüsikaline tähendus
Kujutage ette, mis juhtuks, kui tagasi-EMJ-i ei eksisteeriks? Võrrandist (1) näeme, et ilma tagasi-EMJ-ita on kogu mootor samaväärne puhta takistiga, muutudes seadmeks, mis tekitab palju soojust, mis on vastupidine mootori elektrienergia muundamisele mehaaniliseks energiaks. Elektrienergia muundamise võrrandis UIt on sisendelektrienergia, näiteks aku, mootori või trafo sisendelektrienergia; I2Rt on iga vooluahela soojuskaoenergia, mis on teatud tüüpi soojuskaoenergia – mida väiksem, seda parem; sisendelektrienergia ja soojuskao elektrienergia vahe; see on kasulik energia, mis vastab tagasi-elektromotoorjõule.
UIt on sisendelektrienergia, näiteks aku, mootori või trafo sisendelektrienergia; I2Rt on iga vooluahela soojuskaoenergia, mis on teatud tüüpi soojuskaoenergia – mida väiksem, seda parem; sisendelektrienergia ja soojuskao elektrienergia vahe; see on kasulik energia, mis vastab tagasi-elektromotoorjõule. Teisisõnu, tagasi-elektromotoorjõudu kasutatakse kasuliku energia genereerimiseks ja see on pöördvõrdeliselt seotud soojuskaduga. Mida suurem on soojuskadu energia, seda väiksem on saavutatav kasulik energia. Objektiivselt öeldes tarbib tagasi-elektromotoorjõud vooluringis elektrienergiat, kuid see ei ole "kadu". Tagasi-elektromotoorjõule vastav elektrienergia osa muundatakse elektriseadmete jaoks kasulikuks energiaks, näiteks mootorite mehaaniliseks energiaks, akude keemiliseks energiaks jne.
Teisisõnu, tagasi-elektromotoorjõudu kasutatakse kasuliku energia genereerimiseks ja see on pöördvõrdeliselt seotud soojuskaduga. Mida suurem on soojuskadu energia, seda väiksem on saavutatav kasulik energia. Objektiivselt öeldes tarbib tagasi-elektromotoorjõud vooluringis elektrienergiat, kuid see ei ole "kadu". Tagasi-elektromotoorjõule vastav elektrienergia osa muundatakse elektriseadmete jaoks kasulikuks energiaks, näiteks mootorite mehaaniliseks energiaks, akude keemiliseks energiaks jne.
Sellest on näha, et tagumise elektromotoorjõu suurus tähendab elektriseadme võimet muuta kogu sisendenergia kasulikuks energiaks, mis peegeldab elektriseadme muundamise võime taset.
4. Millest sõltub vastuvoolu elektromotoorjõu suurus?
Vastupidise elektromotoorjõu arvutusvalem on: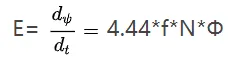
E on mähise elektromotoorjõud, ψ on magnetvoog, f on sagedus, N on keerdude arv ja Φ on magnetvoog.
Ülaltoodud valemi põhjal usun, et igaüks oskab nimetada paar tegurit, mis mõjutavad vastuvoolu elektromotoorjõu suurust. Kokkuvõtteks on siin artikkel:
(1) Vastuelektrijõud on võrdne magnetvoo muutumiskiirusega. Mida suurem on kiirus, seda suurem on muutumiskiirus ja seda suurem on vastuelektrijõud.
(2) Magnetvoog ise on võrdne keerdude arvu ja ühe keerduva magnetvooga korrutatuna. Seega, mida suurem on keerdude arv, seda suurem on magnetvoog ja seda suurem on vastu-EMJ.
(3) Keerdude arv on seotud mähiseskeemiga, näiteks täht-kolmnurkühendus, keerdude arv soone kohta, faaside arv, hammaste arv, paralleelsete harude arv ning täis- või lühikese sammuga skeem.
(4) Ühe pöörde magnetvoog on võrdne magnetomotoorse jõu jagatisega magnettakistusega. Seega, mida suurem on magnetomotoorne jõud, seda väiksem on magnetiline takistus magnetvoo suunas ja seda suurem on vastuelektromagnetjõud.
(5) Magnettakistus on seotud õhupilu ja pooluse ja pilu koordinatsiooniga. Mida suurem on õhupilu, seda suurem on magnettakistus ja seda väiksem on vastu-elektromagnetjõud. Pooluse ja pilu koordinatsioon on keerulisem ja nõuab spetsiifilist analüüsi.
(6) Magnetomotoorne jõud on seotud magneti jääkmagnetismi ja magneti efektiivse pindalaga. Mida suurem on jääkmagnetism, seda suurem on vastumagnetväli. Efektiivpindala on seotud magneti magnetiseerimise suuna, suuruse ja paigutusega ning vajab spetsiifilist analüüsi.
(7) Jääkmagnetism on seotud temperatuuriga. Mida kõrgem on temperatuur, seda väiksem on tagasielektromagnetväli.
Kokkuvõttes hõlmavad vastu-EMF-i mõjutavad tegurid pöörlemiskiirust, keerdude arvu pilu kohta, faaside arvu, paralleelsete harude arvu, täis- ja lühikest sammu, mootori magnetahelat, õhupilu pikkust, pooluste ja pilude sobivust, magnetterase jääkmagnetismi, magnetterase paigutust ja suurust, magnetterase magnetiseerumise suunda ja temperatuuri.
5. Kuidas valida mootori projekteerimisel vastuelektrimootori jõu suurust?
Mootori konstruktsioonis on tagasi-EMJ väga oluline. Kui tagasi-EMJ on hästi disainitud (sobiva suurusega, väikese lainekuju moonutusega), on mootor hea. Tagasi-EMJ-l on mootorile mitu olulist mõju:
1. Vastupinge elektromagnetvälja suurus määrab mootori nõrga magnetvälja punkti ja nõrk magnetvälja punkt määrab mootori efektiivsusdiagrammi jaotuse.
2. Vastu-EMF lainekuju moonutuskiirus mõjutab mootori pulsatsioonimomenti ja pöördemomendi väljundi sujuvust mootori töötamise ajal.
3. Tagasiulatuva elektromagnetvälja suurus määrab otseselt mootori pöördemomendi koefitsiendi ja tagasiulatuva elektromagnetvälja koefitsient on proportsionaalne pöördemomendi koefitsiendiga.
Sellest saab järeldada järgmisi vastuolusid mootori konstruktsioonis:
a. Kui tagumine elektromagnetjõud on suur, suudab mootor madala kiirusega töötamise piirkonnas säilitada kontrolleri piirvoolu juures suurt pöördemomenti, kuid see ei suuda suurel kiirusel pöördemomenti genereerida ega isegi oodatavat kiirust saavutada;
b. Kui vastu-EMJ on väike, on mootoril endiselt väljundvõimsust suurel kiirusel, kuid sama kontrolleri voolutugevuse juures ei ole madalal kiirusel võimalik saavutada pöördemomenti.
6. Vastuelektromagnetvälja positiivne mõju püsimagnetiga mootoritele.
Tagasivoolu elektromagnetvälja olemasolu on püsimagnetmootorite tööks väga oluline. See võib mootoritele pakkuda mõningaid eeliseid ja erifunktsioone:
a. Energiasääst
Püsimagnetiga mootorite tekitatud tagasi-EMF võib vähendada mootori voolu, vähendades seeläbi võimsuskadu, vähendades energiakadu ja saavutades energiasäästu eesmärgi.
b. Suurendage pöördemomenti
Vastu-EMJ on vastupidine toitepingele. Kui mootori kiirus suureneb, suureneb ka vastu-EMJ. Vastupinge vähendab mootori mähise induktiivsust, mille tulemuseks on voolu suurenemine. See võimaldab mootoril genereerida täiendavat pöördemomenti ja parandada mootori võimsusnäitajaid.
c. Tagurpidi aeglustus
Pärast püsimagnetmootori võimsuse kadumist võib see tagasi-EMF-i olemasolu tõttu jätkata magnetvoo genereerimist ja panna rootori edasi pöörlema, mis moodustab tagasi-EMF-i tagurpidi kiiruse efekti, mis on mõnes rakenduses, näiteks tööpinkides ja muudes seadmetes, väga kasulik.
Lühidalt öeldes on tagasi-EMJ püsimagnetmootorite asendamatu element. See pakub püsimagnetmootoritele palju eeliseid ning mängib väga olulist rolli mootorite projekteerimisel ja tootmisel. Tagasi-EMJ suurus ja lainekuju sõltuvad sellistest teguritest nagu püsimagnetmootori disain, tootmisprotsess ja kasutustingimused. Tagasi-EMJ suurusel ja lainekujul on oluline mõju mootori jõudlusele ja stabiilsusele.
Anhui Mingtengi püsimagnetiga elektromehaaniliste seadmete Co., Ltd. (https://www.mingtengmotor.com/)on püsimagnetiga sünkroonmootorite professionaalne tootja. Meie tehnilises keskuses töötab üle 40 teadus- ja arendustöötaja, kes on jagatud kolmeks osakonnaks: projekteerimine, töötlemine ja testimine, spetsialiseerudes püsimagnetiga sünkroonmootorite uurimis- ja arendustegevusele, projekteerimisele ja protsessiinnovatsioonile. Kasutades professionaalset projekteerimistarkvara ja ise väljatöötatud püsimagnetiga mootorite spetsiaalseid projekteerimisprogramme, arvestatakse mootori projekteerimise ja tootmisprotsessi käigus hoolikalt tagumise elektromotoorjõu suurust ja lainekuju vastavalt kasutaja tegelikele vajadustele ja konkreetsetele töötingimustele, et tagada mootori jõudlus ja stabiilsus ning parandada mootori energiatõhusust.
Autoriõigus: see artikkel on WeChati avaliku numbri „电机技术及应用” kordustrükk, algne link https://mp.weixin.qq.com/s/e-NaJAcS1rZGhSGNPv2ifw
See artikkel ei esinda meie ettevõtte seisukohti. Kui teil on teistsuguseid arvamusi või seisukohti, palun parandage meid!
Postituse aeg: 20. august 2024